Everybody seems to want to alter existing designs. The standard response from most designers is that if the boat does not suit your needs, choose a different design which does. Sometimes simple changes in the size of a boat can be made by increasing or reducing the plan dimensions by a small increment - say 10% - but even that is a dangerous thing to do unless the person making the changes is well qualified. As an extreme example, if you double every dimension in a design, the boat will have four times the surface area, eight times the weight, and sixteen times the stability. Those factors work in reverse as well if you reduce the size!
Even more importantly, the scantlings (size of components from an engineering point-of-view) do not necessarily change proportionally, so this sort of work is in the province of qualified people. Your life, and the lives of others may be at risk.
Despite the dangers, people keep wanting to change things. My advice is not to do it - but I know people will...
One of the questions which I get asked time and time again is whether someone can put a larger outboard motor on a particular design than the one specified in the plans. Most of my designs are for sailing-boats and rowing-boats, so the specified motors are usually very small and light.
Either because of an attitude of, “If small is good, bigger is better…”, or because the customer already has a larger engine on hand, the question comes up time and time again. So, why does a designer specify a small engine for what may appear to be quite a sizable boat? It all comes down to hull-form.
Most of you will have heard the terms, ‘Displacement Hull’, ‘Semi-displacement Hull’, and ‘Planing Hull’. What do they mean? Well, there have been plenty of articles written for this magazine and others covering the subject, and it would take a lot of space to write about the subject in great detail, but in a very basic and simplified way it goes like this: -
-
A Displacement Hull sits in the water while moving at her designed speed, pushing aside (or displacing) the water as she moves along, relying on her buoyancy to keep her afloat. As Archimedes discovered while sitting in his bathtub, a body displaces its own weight when floating in a liquid. A displacement hull is designed to run at speeds below about 1.34 times the square-root of the length of her waterline (in feet), with the result expressed in knots. So, a boat with a sixteen foot waterline length would run at a ‘displacement speed’ in knots which equals the square root of 16 (which is 4) multiplied by 1.34, giving a top speed of 5.36 knots. If you try to push a boat which is shaped to operate efficiently in this speed-range any faster, she will just lift her bow, drop her stern and absorb the excess power by making huge waves. This is an over-simplification, but it gives the idea.
-
A Semi-Displacement Hull runs at a speed which is above that of the displacement hull. The boat gains the majority of her support from the displacement of water, and a small amount from dynamic lift, which is the reaction of the water against a fast-moving hull. Semi-displacement hulls (also known as ‘semi-planing’ hulls) are shaped to run efficiently in the speed range between 1.34 and 2.5 times the square root of the waterline length. So in the case of the sixteen foot water line we mentioned, a semi-displacement boat would run at up to 10 knots without getting bogged down or pointing her bow at the sky.
-
A Planing Hull runs at a speed where the majority of the support provided by the water is in the form of reaction to the speed of the boat, and the hull is lifted high in the water. A good example of this is a water-skier. Planing hulls run in the speed ranges above 2.5 times the square root of the waterline length, and their hulls are characterized by long, straight undersurfaces (or ‘buttock lines’) in the aft sections.
All of the above is a much too simple explanation of a complex subject which is full of variables and blurred boundaries. The experts will want to take me to task regarding my descriptions, but I’m just giving an overview. There are many very good technical publications on the subject, including Lindsay Lord's famous book, "Naval Architecture of Planing Hulls"
Now, to get back to my original line – why shouldn’t someone put a bigger motor on a particular design?
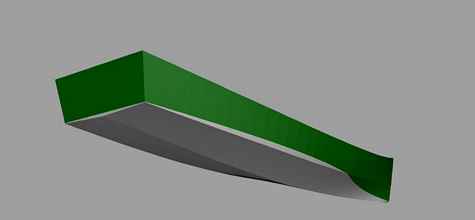
In the following illustrations, I've deliberately used hulls which have similar cross-sections to make the changed waterline shapes easier to associate with relatively minor changes in the longitudinal run of the lines.
Displacement Hull
If a boat is designed to run efficiently at displacement speeds, you will generally find that the buttock lines (basically the lines of the bottom, running parallel with the longitudinal centreline, viewed in profile) run up to finish at, or above the surface.
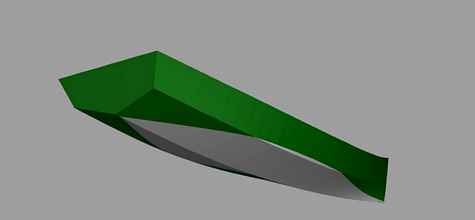
With a shape like this, there is not much buoyancy aft to carry the weight of a larger motor, and more importantly, attempting to push the boat faster will produce all of the bad behaviour previously mentioned. Her bow will point at the sky, and she may well become unstable. The only power you need to make this hull work well is the amount necessary to get her to the ‘hull’ speed with some more in reserve to handle strong head winds, large waves, or maybe some towing duties. The point being that the extra power is just to keep her going at hull-speed in adverse conditions – not to push her faster.
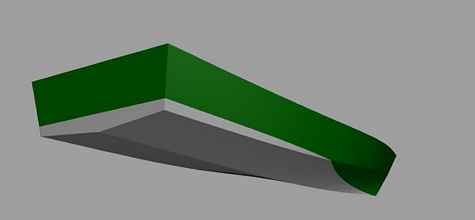
Semi-displacement Hull
The next case is the ‘semi-displacement” (or ‘semi-planing’) hull-form.
With this hull-form there is more reserve buoyancy in the aft sections to carry the weight of a bigger motor, but if the boat is pushed faster than her hull-speed (say 2.5 times the square root of the waterline length which for a sixteen foot waterline is 10 knots) she will probably start to behave erratically, will point her bow up high, and will burn lots of fuel making waves.
Planing Hull
Lastly there is the planing hull proper.
Now you can see a shape which has plenty of volume to carry the weight of a large motor, as well as having straight buttock lines. With enough power, this boat will get up near the surface and run as a true planing hull. It will be capable of reaching high speeds while remaining stable longitudinally and laterally. But, if you need to slow down because of rough water, for example, this shape will exhibit poor manners – steering erratically downwind, or in a quartering sea, and tending to bury her bow as the high-volume stern is lifted by waves and the low-volume bow is pushed down into the water. Also, at low-speed this shape will pull half the ocean around behind it because of the deeply immersed transom. Large unstable eddies forming around its perimeter will produce the erratic steering referred to above..
As I have been at pains to point out, this is a complex subject, and it requires much study and research for someone to gain a decent understanding of the hydrostatics and hydrodynamics involved - I only know the basics. But if you want to learn more, enroll in a properly accredited course from somewhere like Westlawn, and immerse yourself in good-quality books and publications. One excellent print magazine is Professional Boatbuilder, which runs detailed technical articles written by authors who know their subjects.
No boat will do everything – if you want a fine-lined rowing-boat or a sweet sailing dinghy which will make your heart sing as you sweep across your favourite piece of water, don’t go thinking about putting on a big motor. Similarly, if you have a pure planing hull, don’t expect her to steer well and ride like a duck if you use a little motor or slow your big motor down in rough conditions.
[Ross has started a new blog at: https://rosslillistonewoodenboat.blogspot.com/]
***********

|